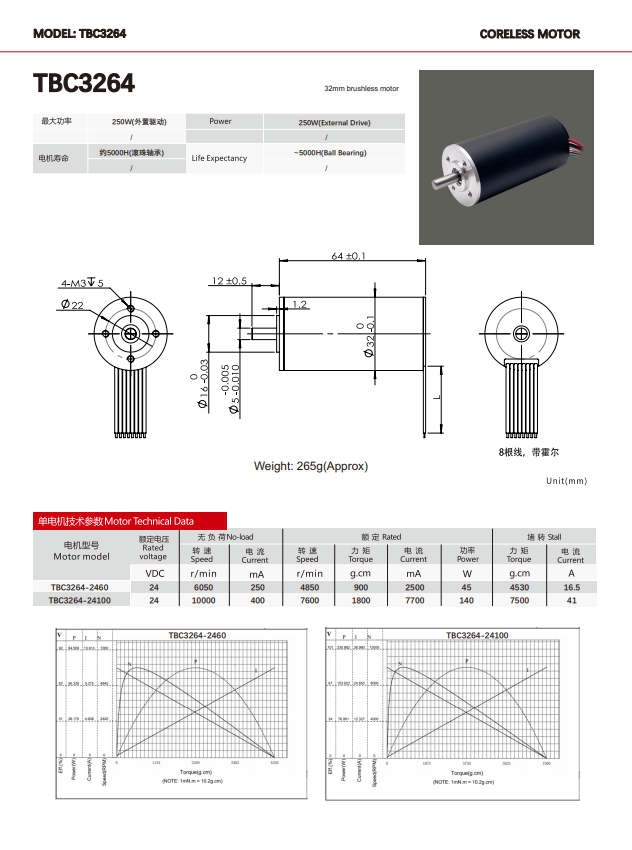
TBC3264 12V 24V 32mm Pes Şowhunly Uzak Ömürli Hemişelik Magnit Mikro BLDC Motor Elektrik Çotgasyz DC Özeksiz Motor





1. Ýokary netijeli hemişelik magnit hereketlendiriji, ýokary energiýa dykyzlygy
Ýokary öndürijilikli hemişelik magnitleri, boş käse özensiz gurluş bilen birleşdirip, gyrymsy tok ýitgisi aradan aýrylýar we energiýany öwürmegiň netijeliligi >90% -e deňdir, bu bolsa ýokary ýüklenmeli üznüksiz iş ssenarileri üçin amatlydyr.
2. Uly uzak hyzmat möhleti we ygtybarlylygy
Çotgasyz dizaýn çotganyň aşynmagyny doly aradan aýyrýar we keramiki podşipnikler we doly metaldan ýasalan reduktorlar bilen, ulanyş möhleti 10,000 sagatdan gowrak bolup, senagat derejeli enjamlaryň 7×24 sagatlyk iş talaplaryna laýyk gelýär.
3. Gaty pes ses we titreme optimizasiýasy
Içi boş käse rotorynda gisterezis ýitgisi ýok, simmetrik magnit zynjyr dizaýny we takyk dinamiki balans kalibrlemesi bilen utgaşdyrylýar, iş sesi <40dB bolup, akustik taýdan duýgur ýagdaýlar üçin amatlydyr.
4. Giň naprýaženiýe gabat gelmegi we akylly gorag
12V/24V goşa woltly girişi goldaýar, içine gurlan artykmaç tokdan, gyzgynlykdan we ters birikme gorag zynjyrlaryny goldaýar, litium batareýa toplumlaryna ýa-da senagat DC elektrik çeşmelerine uýgunlaşýar we çylşyrymly iş şertlerinde durnukly işlemegi üpjün edýär.
5. Ýokary moment we dinamiki jogap
Nominal moment ýükü derrew çalyşmagy goldamak üçin sazlanyp bilner (awtomatlaşdyrylan önümçilik liniýalarynyň çalt başlamagy we togtadylmagy, robot birleşmeleriniň ýokary ýygylykly hereketi ýaly).
1. Modul integrasiýa edilen dizaýn
32 mm ykjam diametri, boş wal ýa-da iki çykyşly wal gurluşyny goldaýar, kodlaýjylary, tormozlary ýa-da sowadyjy wentylýatorlary birleşdirmek aňsat we köp derejeli erkinlikdäki robot gollaryna uýgunlaşýar.
2. Akylly dolandyryş utgaşyklylygy
FOC algoritmini goldaýar, Hall sensory/köp öwrümli absolýut kodlaýjy bilen enjamlaşdyrylan, pozisiýanyň gaýtalanma takyklygy ±0.02°, tizligi dolandyrmagyň takyklygy ±0.5%, CNC stanoklarynyň, takyk optiki platformalaryň we ş.m. ýokary takyklyk talaplaryna laýyk gelýär.
3. Köp basgançakly reduktorly reduktoryň uýgunlaşdyrylmagy
Pes tizlikli agyr ýük ýa-da ýokary tizlikli ýeňil ýük senariýlerini goldaýan, maksimum çykyş momenti 20N·m bolan planetar reduktor bilen enjamlaşdyrylyp bilner.
4. Pes elektromagnit päsgelçilik we doly sertifikatlaşdyrma
CE we RoHS sertifikatlaryna eýe, lukmançylyk enjamlary (MRT kömekli robotlar) we aragatnaşyk enjamlary (5G baza stansiýasynyň antennasyny sazlamak ulgamy) bilen utgaşykly.
1. Senagat awtomatlaşdyrmasy we robototehnika
Agyr ýük robot goly: Awtomobil kebşirleme robotynyň birleşdirilen hereketlendirijisi (ýeke birleşdirilen moment talaplary 3-6N·m), CNC maşyn gurallarynyň gurallaryny çalşyrmak mehanizmi.
Logistika awtomatlaşdyrmasy: Stereoskopik ammar üýşürijisiniň göteriji oklary, Ekspres sortlaýjy maşynyň aýlanýan tigir hereketlendirijisi.
Takyk işleme: Ýarymgeçirijili plastinka işleme manipulýatory, lazer kesiş maşynynyň fokus sazlama moduly.
2. Lukmançylyk we laboratoriýa enjamlary
Surat diagnozy: KT apparaty aýlanýan reýka hereketlendirijisi, ultrases zond köp ölçegli sazlama mehanizmi.
Hirurgiki Robot: Ortopediki Nawigasiýa Robotik Gol Güýç Moduly, Minimal Inwaziw Hirurgiki Enjam Bilek Birleşmesi.
Laboratoriýa gurallary: Santrifüž ýokary tizlikli rotor hereketlendirijisi, Awtomatlaşdyrylan nusga suwuklyk paýlaýyş ulgamy.
3. Ýokary derejeli akylly enjamlar
Akylly Öý: Ýokary derejeli massaž oturgyjy, köp okly hereketlendiriji, akylly perde agyr ýük göteriji rels motory.
Täze energiýa meýdany: Zarýad beriji tüpeňiň başyny gulplamak mehanizmi, fotowoltaik paneli arassalaýjy robot aýlanýan birleşme.