TBC1625 6V 12V 16mm Uzak Ömrli Ýokary Tizlikli Mikro BLDC Motory PWM Dolandyryşly Elektrik Mini Çotgasyz Özeksiz DC Motory





1. Ýokary netijelilik we energiýa tygşytlaýjy, örän uzak ömür
Çotgasyz içi boş käse dizaýny çotkanyň sürtülme ýitgisini we özeniň gyrymsy tok ýitgisini doly aradan aýyrýar, energiýa öwrülme netijeliligi >85% we örän pes ýylylyk öndürýär. Aşynma garşy keramiki podşipnikler bilen utgaşdyrylanda, ömrüniň dowamlylygy 10,000 sagatdan hem köp bolup biler, bu bolsa günde 24 sagat işlemeli robot birleşmeleri ýa-da awtomatlaşdyrma enjamlary üçin amatlydyr.
2. Kiçieltmek we ýeňil
Diametri bary-ýogy 16 mm, agramy <30 g we energiýa dykyzlygy 0.5W/g çenli ýokary, bu bolsa giňişlik çäklendirilen ýagdaýlar üçin (meselem, mikro robot barmak birleşmeleri, endoskop dolandyryş modullary) amatlydyr.
3. Ýokary tizlik we ýokary takyklykly dolandyryş
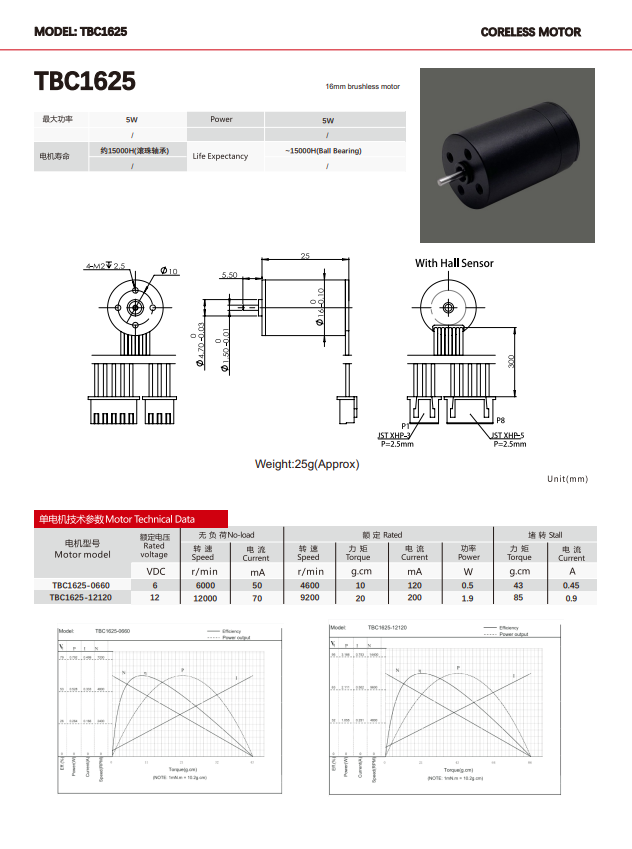
Ýüksüz tizlik 6000-15,000 RPM-e ýetip biler (naprýaženiýe we ýük sazlamasyna baglylykda), tizligiň takyk düzgünleşdirilmegini (PWM/analog naprýaženiýe), tizligiň üýtgemeleriniň <1%, momentiň takyklygy ±2% -i goldaýar we robotyň traýektoriýasyny meýilleşdirmek ýa-da enjamlaryň takyk ýerleşdirilmegi talaplaryna uýgunlaşýar.
4. Ultra pes inersiýa, çalt jogap
Özersiz rotoryň aýlanma inersiýasy adaty çotkaly motoryň aýlanma inersiýasynyň diňe 1/5 bölegine deňdir we mehaniki wagt sabitligi 5ms-den azdyr, bu bolsa millisekund derejesinde başlangyç-durma we yzyna hereket edip, ýokary tizlikli tutuş ýa-da ýokary ýygylykly titreme zerurlyklaryny kanagatlandyryp biler.
5. Sessiz we päsgelçiliklere garşy ukyp
Çotga uçgunlary we elektromagnit päsgelçilikleri ýok (CE sertifikaty), iş sesi <35dB, elektromagnit taýdan duýgur gurşawlar ýa-da adam-kompýuter gatnaşygyny talap edýän ýagdaýlar üçin amatly.
1. Giň naprýaženiýe gabat gelmegi
6V-12V DC girişini goldaýar, litium batareýalary, superkondensatorlar ýa-da naprýaženiýe regulýatorlary bilen utgaşykly, enjamlaryň howpsuzlygyny üpjün etmek üçin gurlan artykmaç naprýaženiýe/ters gorag zynjyry.
2. Ýokary moment we reduktoryň uýgunlaşmasy
Nominal moment 50-300mNm (özgertmek mümkin), çykyş momenti integrasiýa edilen planetar reduktordan soň 3N·m ýetip biler, azalma gatnaşygy 5:1-den 1000:1-e çenli, pes tizlikli ýokary moment ýa-da ýokary tizlikli ýeňil ýük talaplaryna laýyk gelýär.
3. Ähli metallardan ýasalan takyk gurluş
Gabyk awiasiýa alýuminiýinden ýasalýar, içki dişliler bolsa poslamaga çydamly we güýçli ýylylyk ýaýradyjy polatdan ýa-da titan garyndysyndan ýasalyp bilner. Iş temperaturasynyň diapazony -20℃-den +85℃-e çenli bolup, ol berk gurşawa uýgunlaşyp bilýär.
4. Akylly dolandyryş utgaşyklylygy
Hall sensoryny, magnit kodlaýjyny ýa-da torly teswiri goldaýar, CANopen we RS485 aragatnaşyk protokollary bilen utgaşykly, ROS ýa-da PLC dolandyryş ulgamyna bökdençsiz birikdirilip bilner we ýapyk aýlawly pozisiýany/tizligi dolandyrmagy amala aşyrýar.
5. Modul dizaýn
Fotoelektrik enkoderleriň integrasiýasyny ýa-da kabel geçirijiligini ýeňilleşdirmek, enjamyň içki giňişligini tygşytlamak üçin boş wal ýa-da iki wally görnüşler bar.
1. Robototehnika
Senagat robotlary: SCARA robot gol birleşmeleri, Delta robot tutujy ok, AGV rul serworosy.
Hyzmat robotlary: adam şekilli robotyň barmak birleşmeleri, ýol görkeziji robotyň baş rul moduly.
Mikro robotlar: bionik mör-möjek sürüjisi, turba geçirijisini barlamak üçin robot hereketlendirijisi.
2. Lukmançylyk we takyklyk gurallary
Hirurgik enjamlar: minimal inwaziw hirurgik forsepsler açylýar we ýapylýar, oftalmologik lazer terapiýasy gurallarynyň fokusyny sazlamak.
Laboratoriýa enjamlary: PZR enjam nusga plastinkasynyň aýlanyşy, mikroskopyň awtofokus moduly.
3. Sarp ediji elektronikasy we akylly enjamlar
Uçarsyz uçarlar: gimbal durnuklaşdyryjy motor, gatlanýan ganat servo.
Geýilýän enjamlar: akylly sagadyň taktil yzyna gaýtaryş motory, AR gözlükleriniň fokus sazlama motory.
4. Awtomobil we senagat awtomatlaşdyrmasy
Awtomobiliň takyklyk gözegçiligi: ulaga oturdylan HUD proýeksiýa burçuny sazlamak, elektron gaz pedalynyň mikro hereketlendirijisi.
Senagat barlagy: ýarymgeçirijili wafer işleýän robot goly, takyk paýlaýjy maşynyň ýelim çykyşyny dolandyrmak.