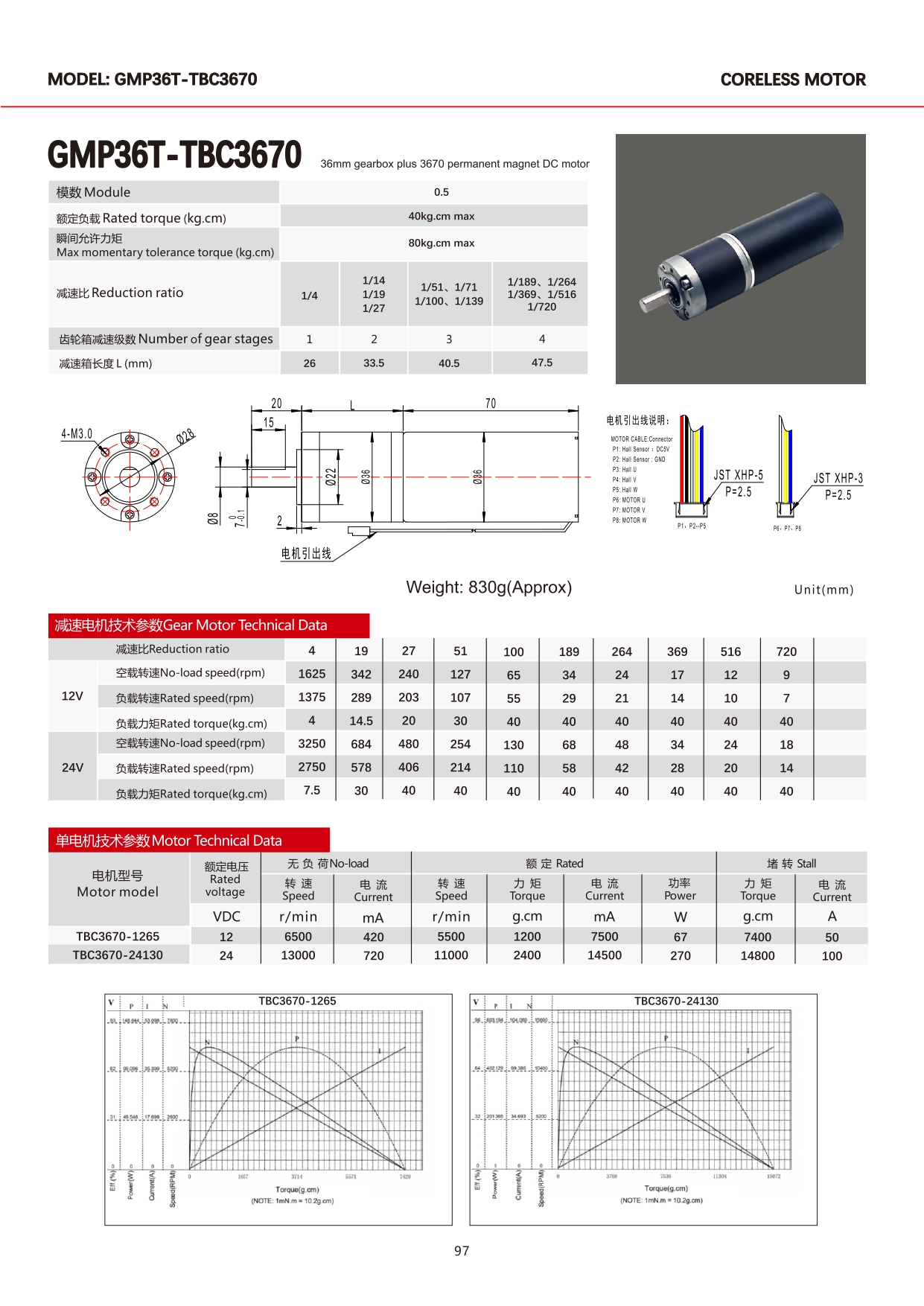
GMP36T-TBC3670 36mm Işlenen Planetar Dişli Motor, Takyk Metal Dişli Gutusu bilen Çotkasyz Özeksiz 24V Ýokary Torkly BLDC Dişli Motor





36 * 70 mm işlenen çotkasyz planetar dişli motor, hereketi dolandyryş integrasiýasynyň iň ýokary derejesini görkezýär. Bu berk enjam ýokary öndürijilikli 36 mm çotkasyz özensiz motory deň diametrli takyk işlenen planetar dişli gutusy bilen birleşdirip, 70 mm uzynlykdaky ykjam kuwwatly stansiýa döredýär. Işlenen dişli gutusynyň gurluşy berk önümlerden aerokosmos derejesindäki çydamlylyklara çenli öndürilen bölekleri öz içine alýar, bu bolsa minimal yza serpikdiriş, ajaýyp berklik we ýokary çydamlylyk berýär. Bu integrasiýa edilen dişli motor, özensiz tehnologiýanyň takyk dişli peseltme arkaly güýçlendirilen ýumşak we netijeli güýjüni üpjün edýär we ösen robot we awtomatlaşdyrma ulgamlary üçin zerur bolan jogapkärlik we dolandyryş ukyby bilen ýokary çykyş momentini üpjün edýär.
Aerokosmos derejesindäki işlenen dişli gutusy: Sürtgüç gutusy mikronlarda ölçenýän çydamlylyklara ýetmek üçin ýokary derejeli metallardan (meselem, poslamaýan polat ýa-da berklenen erginler) işlenen korpuslara we dişli gutulara eýedir. Bu gurluş minimal ters täsiri (köplenç 1° -den aşak), ajaýyp konsentrikligi we ýokary zarba ýüklerine we üznüksiz işlemegiň dowamlylygyny üpjün edýär.
Özeksiz ýumşaklyk bilen ýokary moment dykyzlygy: Özeksiz motor nol dişli we ýumşak moment bermegi üpjün edýär, köp basgançakly planetar reduktor bolsa moment çykaryşyny ep-esli köpeldýär. Netijede, standart motor-reduktor kombinasiýalarynda deňsiz-taýsyz takyklyk we ýumşaklyk bilen uly ýükleri hereketlendirip bilýän hereketlendiriji ulgam döreýär.
Ýokary Dinamik Işleýiş: Pes inertiýaly özensiz rotor dişli çarhyň üsti bilen çalt tizlenme we haýallamagy üpjün edýär, bu bolsa ýerleşdirilişiň we tizligiň üýtgemelerine jogapkär bolmagyna mümkinçilik berýär. Bu dinamiki işleýiş hyzmatdaşlykly robotlar we ýokary tizlikli awtomatlaşdyrma üçin möhümdir.
Möhürlenen we berk gurluş: Işlenen korpus IP54 ýa-da ondan ýokary giriş goragy üçin mümkinçilikleri üpjün edýän takyk möhürleme interfeýslerini üpjün etmäge mümkinçilik berýär. Takyk podşipnikler ýokary radial we ok boýunça ýük göterijilik üçin motory we çykyş wallaryny goldaýar.
Optimallaşdyrylan Termal Dolandyryş: Metall reduktor korpusy iş wagtynda motordan ýylylygy çekip, ýylylygy saklaýjy hökmünde hereket edýär. Bu termal netijelilik, momentiň peselmegine ýol bermezden, ýokary aýlanma momentiniň durnukly ulanylmagyna mümkinçilik berýär.
Bilelikdäki we senagat robotlary: Bilelikdäki robotlarda (kobotlar), ýeňil senagat robotlarynda we güýji takyk dolandyrmagy we yza hereketlendirmegi talap edýän ekzoskeletlerde bilelikdäki hereketlendirijiler üçin ideal.
Lukmançylyk robotlary we hirurgik ulgamlar: Hirurgiki robot gollary, dikeldiş robotlary we öňdebaryjy protez enjamlary üçin ajaýyp, bu ýerde takyklyk, ygtybarlylyk we ýumşak hereket möhümdir.
Senagat awtomatlaşdyrmasy: takyk indeksleme stollary, ýokary öndürijilikli konweýer sürüjileri, gaplama enjamlary we takyk ýerleşdirmegi talap edýän awtomatlaşdyrylan ýygnamak ulgamlary üçin amatly.
Aerokosmos hereketlendirmesi: Ygtybarlylygyň we takyklygyň iň möhüm bolan uçuş üçin möhüm hereketlendirme ulgamlarynda, gonuş şassileriniň mehanizmlerinde we hemra ýerleşdiriş ulgamlarynda ulanylýar.
Goranmak we howpsuzlyk: Gözegçilik ulgamynyň pan-tilt mehanizmlerinde, pilotsyz ýerüsti ulaglaryň hereketlendirijilerinde we takyk ýarag durnuklaşdyryş ulgamlarynda ulanylýar.